Závesný moment. Dobrý deň, študent Pozrite sa, čo je „Hinge moment“ v iných slovníkoch
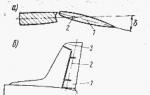
0Zníženie momentu otáčania volantu, čo vedie k zníženiu sily na ovládacích pákach, sa vykonáva pomocou aerodynamickej kompenzácie. Medzi aerodynamické prostriedky kompenzácie patria (obr. 63): axiálna a klaksónová kompenzácia kormidiel; vnútorná alebo statická kompenzácia kormidiel; servokompenzátor; pružinový servokompenzátor.
Podstatou axiálnej kompenzácie je, že os otáčania volantu nie je umiestnená pozdĺž špičky, ale trochu za (bližšie k stredu tlaku). V dôsledku zmenšovania vzdialenosti aerodynamickej sily R p od osi otáčania sa zmenšuje kĺbový moment. Ďalší pohyb osi otáčania v smere od špičky môže viesť k zmene znamienka momentu závesu; tento jav sa nazýva nadmerná kompenzácia. Výška osovej kompenzácie sa určí zo vzťahov:
Kde S r.v, S r.n, S el - respektíve oblasti výškovky, smerovky a krídelky; S k.v, S k.n, S k.e - plochy kompenzačnej časti označených kormidiel.

U kormidiel vybavených kompenzáciou klaksónu je koncová časť kormidlovej plochy umiestnená pred osou riadenia a pri natočení volantu aerodynamická sila pôsobiaca na kompenzátor klaksónu vytvára moment opačný ako moment závesu.
Na krídelkách sa najčastejšie používa vnútorná alebo statická kompenzácia kormidla. Špička krídielok je spojená s krídlom vzduchotesnou pružnou membránou. Pri vychýlení krídielka nadmerný tlak na membránu vytvára silu, ktorá prispieva k jej vychýleniu. Tento typ kompenzácie sa vyznačuje absenciou prúdenia vzduchu z oblasti vysokého tlaku do zóny nízkeho tlaku, ako aj elimináciou výstupu špičky kormidla, keď sa odchyľuje nad rozmery krídla, čo znižuje ťah krídla. Vnútorná kompenzácia je užitočná najmä pri lietaní vysokými rýchlosťami, ale je ťažké ju implementovať do tenkých profilov, pretože obmedzuje uhly vychýlenia krídielok.
Na obr. 63, d znázorňuje schému servokompenzátora. Jeho princíp fungovania je podobný ako pri zastrihávači. Zároveň je medzi nimi podstatný rozdiel. Ak sa trimr vychyľuje len na vôľu pilota a vychýlenie kormidla nespôsobí rotáciu trimra, potom sa servokompenzátor pomocou štvorčlánkového mechanizmu vychyľuje vždy v opačnom smere ako je vychýlenie hlavičky. kormidlo.
Uhol vychýlenia kompenzátora sa zväčšuje s rastúcim vychýlením riadenia.
Uvažujme o činnosti pružinového servokompenzátora. Vahadlo Control, uložené na osi otáčania volantu na ložiskách, je spojené s volantom cez pružinovú tyč s predpätými pružinami (na schéme je pre zjednodušenie táto tyč znázornená ako jedna pružina). Druhý koniec vahadla je spojený s kompenzátorom tuhou tyčou. Ak odstránite pružinovú tyč, otáčanie ovládacieho vahadla nespôsobí vychýlenie volantu, ale spôsobí otáčanie kompenzátora. V prípade, že aerodynamické sily pôsobiace na volant sú malé a sily potrebné na vychýlenie volantu nepresiahnu sily predpätia pružín v pružinovej tyči, možno ju považovať za tuhú tyč konštantnej dĺžky a otáčanie volantu nespôsobuje vychýlenie kompenzátora. V tomto prípade vzhľadom na malú hodnotu momentu závesu nie je potrebné použitie aerodynamickej kompenzácie.
Ale akonáhle sa aerodynamické sily pôsobiace na kormidlo zväčšia, napríklad v dôsledku zväčšenia uhla vychýlenia kormidla alebo zvýšenia rýchlosti letu, a na vychýlenie kormidla sú potrebné sily v riadiacej tyči, ktoré presahujú sily predbežného utiahnutia pružín v pružinovej tyči, potom pri vychýlení kormidla sa pružinová tyč súčasne predĺži alebo skráti. To spôsobí otáčanie vahadla vzhľadom na volant a vychýlenie kompenzátora v smere opačnom k vychýleniu volantu. Uhol vychýlenia kompenzátora je úmerný sile potrebnej na vychýlenie volantu.
Automaticky aktivovaný (vychýlený) servokompenzátor tak znižuje úsilie potrebné na vychýlenie volantu na úplne prijateľné hodnoty. Pružinový servokompenzátor je široko používaný na kormidlách viacmotorových lietadiel.
Výpočty ukazujú, že nadzvukové lietadlá zažívajú mimoriadne silný nárast riadiacich síl. Široký rozsah zmien týchto síl od malých pri podzvukových rýchlostiach až po veľmi veľké pri nadzvukových rýchlostiach letu si vyžaduje zavedenie premennej aerodynamickej kompenzácie v zmysle Machovho čísla. Tu uvažované typy kompenzácie neumožňujú dosiahnuť prijateľné (veľkosť a znamienko) sily na ovládacích pákach pri všetkých rýchlostiach letu. Východiskom bolo použitie riadiaceho systému, v ktorom sa zvyšuje úsilie pilota.
Avšak aj v prítomnosti riadiacich zosilňovačov (posilňovačov) musia mať volanty aerodynamickú kompenzáciu: po prvé, aby sa znížil požadovaný výkon posilňovačov, a po druhé, aby sa zvýšila bezpečnosť núdzového prechodu na manuálne ovládanie, keď posilňovač zlyhá. .
Vyvažovanie hmotnosti (kompenzácia hmotnosti) kormidiel je navrhnuté tak, aby sa zabránilo netlmeným elastickým vibráciám chvosta a krídla, ktoré vznikajú pri lete pri vysokých kritických rýchlostiach. Podstatou kompenzácie hmotnosti je, že ťažisko volantu je zarovnané s osou jeho otáčania pomocou prídavných závaží umiestnených v prednej časti volantu alebo je posunuté dopredu voči osi. V druhom prípade sa kompenzácia hmotnosti nazýva nadmerná.
Kompenzácia hmotnosti sa vykonáva pomocou liatinových tyčí a rôznych jednotiek inštalovaných v špičke volantu. Je tiež možné nainštalovať kompenzačné závažie na špeciálne konzoly pripevnené k volantu. Tieto protizávažia bývajú umiestnené vo vnútri pevných častí chvosta alebo vo vnútri trupu.
Použitá literatúra: „Fundamentals of Aviation“ autori: G.A. Nikitin, E.A. Bakanov
Stiahnite si abstrakt: Nemáte prístup k sťahovaniu súborov z nášho servera.
Hovorím im aerodynamické závesné momenty? momenty aerodynamických síl pôsobiacich na ovládacie prvky vzhľadom na ich osi otáčania.
Kĺbový moment sa považuje za pozitívny, ak má tendenciu vychýliť volant (krídelko) v kladnom smere.
Pri lietadlách s reverzibilným riadiacim systémom závisia sily, ktorými pôsobí pilot na riadiace páky, od veľkosti kĺbových momentov. Pri automatickom alebo manuálnom ovládaní s pohonom riadenia (posilňovačom) určujú momenty kĺbov silu pohonu riadenia, ktorý vychyľuje ovládacie prvky.
Závesný moment akejkoľvek kontroly
Msh = otsh5pdrA0I7> (10,112)
kde tsh je koeficient kĺbového momentu; Sp, bdr - plocha a priemerná aerodynamická tetiva riadenia; kon je koeficient brzdenia prietoku v oblasti chvosta.
V moderných vysokorýchlostných lietadlách, ktoré majú veľké ovládacie prvky a lietajú pri vysokých rýchlostných tlakoch, sú závesné momenty veľké. Veľkosť kĺbového momentu možno znížiť znížením koeficientu tsh pomocou aerodynamickej kompenzácie. Uvažujme o hlavných typoch aerodynamickej kompenzácie.
Axiálna kompenzácia. Keď sa os otáčania posunie späť od nábežnej hrany, časť volantu umiestnená pred osou otáčania (kompenzátor) vytvorí závesný moment opačného znamienka. To povedie k zníženiu celkového kĺbového momentu volantu (obr. 10.19, a). Ak je os otáčania zarovnaná so stredom tlaku volantu, moment závesu sa rovná nule - dôjde k plnej kompenzácii. Pri ďalšom posunutí osi otáčania späť dôjde k nadmernej kompenzácii a zmene - . objaví sa znak závesného momentu.
Axiálna kompenzácia je najbežnejšia kvôli jednoduchosti jej konštrukcie a dobrým aerodynamickým vlastnostiam, komplikuje ju však skutočnosť, že poloha stredu prítlaku kormidla závisí od Machovho čísla letu.
Vnútorná kompenzácia je koncepciou blízka axiálnej kompenzácii a častejšie sa používa na krídelkách (pozri obr. ‘10.19, b). Kĺbový moment je znížený v dôsledku momentu síl pôsobiacich na kompenzátor umiestnený v dutine s úzkymi štrbinami vo vnútri krídla (chvost). Horná časť dutiny je hermeticky oddelená od spodnej pružnej membrány. Kompenzátor nie je obletovaný prúdom vzduchu, ale je pod vplyvom tlakového rozdielu, ktorý vzniká v dutine pri vychýlení krídelka (kormidla). Kompenzátor nevnáša poruchy do prúdenia, čo je dôležité najmä pri vysokých Machových číslach.Nevýhodou takejto kompenzácie je obmedzenie rozsahu vychýlenia ovládačov, najmä pri tenkom profile krídla (chvost).
Servokompenzátor je prídavné kormidlo kinematicky spojené s hlavným kormidlom a pevnou časťou chvostovej plochy tak, že pri vychýlení hlavného kormidla pod určitým uhlom sa servokompenzátor vychýli o uhol úmerný tomu v opačnom smere (pozri obr. 10,19, c). V tomto prípade pôsobia aerodynamické sily na servokompenzátor, čím sa znižuje moment otáčania volantu.
Na ľahkých podzvukových lietadlách sa používa kompenzácia klaksónu, ktorá je súčasťou plochy volantu, umiestnená pred osou otáčania a umiestnená na okraji riadiacich plôch. Nevýhodou takejto kompenzácie je možnosť natriasania ocasnej plochy v dôsledku narušenia prúdenia pri veľkých uhloch vychýlenia kormidla.
Kĺbový moment výťahu môžete znížiť aj vychýlením (preusporiadaním) pohyblivého stabilizátora.
Aerodynamická kompenzácia, ak je správne zvolená, znižuje moment závesu, ale nie. zníži na nulu.
Počas dlhého letu v akomkoľvek režime je vhodné znížiť moment závesu na nulu. Na tento účel sa používajú trimre.
Trimr je pomocná plocha na zadnej strane kormidla alebo krídelka, ktorá nie je kinematicky spojená s výchylkou kormidla (pozri obr. 10.19, d). Trimmer je ovládaný nezávisle od kokpitu. ■ ‘
Aby sa dosiahol nulový závesný moment, trimér sa vychýli o vhodný uhol, ktorý je v opačnom znamienku ako uhol vychýlenia hlavného volantu.
Pri určovaní kĺbových momentov je jedinou spoľahlivou metódou experimentálna.
Výsledky experimentálneho spracovania dát ukazujú, že v rámci plynulého toku sú koeficienty kĺbového momentu Lineárne funkcie uhlov nábehu (prevesenie), uhlov vychýlenia kormidiel (krídielok) a trimra.
Približné výpočtové vzorce na odhad derivačných kĺbových momentov počas návrhu sú uvedené v.
Hodnotu súčiniteľa kĺbového momentu výrazne ovplyvňuje stlačiteľnosť vzduchu. S nástupom vlny
Ryža. 10.20. Približná závislosť koeficientu tsh od čísla M
 kríza sa ťažisko tlaku na ovládacích plochách posúva dozadu a koeficient závesného momentu pri transsonických rýchlostiach prudko rastie (obr. 10.20),
kríza sa ťažisko tlaku na ovládacích plochách posúva dozadu a koeficient závesného momentu pri transsonických rýchlostiach prudko rastie (obr. 10.20),
moment Msh, aerodynamické sily pôsobiace na ovládací prvok vzhľadom na jeho os otáčania. V aerodynamických štúdiách sa zvyčajne používa koeficient závesného momentu (pozri Aerodynamické koeficienty) msh, rovný
msh = Msh/(qSbA),
kde q je rýchlostný tlak, S je plocha povrchu kontroly, bA je jej MAC. Sh. m. nastáva pri vychýlení riadiaceho prvku (OU) (charakterizovaného hodnotou derivácie msh(δ) koeficientu Sh. m. uhlom (δ) vychýlenia operačného zosilňovača) a pri mení sa uhol nábehu (α) (charakterizovaný deriváciou msh(α) Sh. m. koeficientu m. o (α)). Závislosti msh(δ) a msh(α) od uhlov (δ) a (α) sú vo všeobecnom prípade nelineárne, preto je dôležitou charakteristikou maximálna hodnota msh v uvažovanom rozsahu uhlov vychýlenia. operačný zosilňovač a uhly nábehu. Hladina hluku závisí od geometrických charakteristík operačného zosilňovača, letových režimov atď. Pri prechode rýchlosťou zvuku sa hladina hluku výrazne zvyšuje. Hodnota Sh.m určuje silu potrebnú na vychýlenie operačného zosilňovača; zníženie tohto úsilia sa dosiahne kompenzáciou Sh.
Zobraziť hodnotu Závesný moment v iných slovníkoch
Moment- m.chvíľa, chvíľa, minúta; | čas, čas, krátky urgentný čas. sila, v mechanike: súčin sily a olovnice. - zotrvačnosť, zotrvačnosť, sila odporu tela voči pohybu. alny,.........
Dahlov vysvetľujúci slovník
Kĺbové- kĺbový, kĺbový. 1. Príd. na pánt, čo je pánt, usporiadaný na pántoch, pomocou pántov. Pánty. Otočné kĺby. Závesová reťaz. mechanizmus.
Ušakovov vysvetľujúci slovník
Moment- Priaznivé, dôležité, ziskové, hlavné, dlho očakávané, dramatické, významné, historické, krízové, kritické, vrcholné, intenzívne, nezabudnuteľné,......
Slovník epitet
Momentálne Adv. Razg.- 1. Veľmi rýchlo, okamžite.
Výkladový slovník od Efremovej
Kĺbový Adj.— 1. Korelatívne vo význame. s podstatným menom: s ním spojený pánt. 2. Súvisiace s pántom, charakteristické preň. 3. Závesné, s pántami.
Výkladový slovník od Efremovej
Moment- -A; m. [lat. spád]
1. Veľmi krátky časový úsek; moment, moment. Prešlo len jedno m. Cez m. sa niekde ocitnite. Spustite ruku len k m.Okamihy radosti, bolesti, inšpirácie.
2.........
Kuznecovov výkladový slovník
Diferenciácia výmenného kurzu v čase otvorenia— SPLIT OPENING Znateľné rozpätie cien akcií na začiatku obchodovania na burze. Táto situácia niekedy nastáva v prípadoch, keď sú dôležité informácie týkajúce sa konkrétneho......
Ekonomický slovník
Moment— - 1. konkrétny, diskrétny časový bod; veľmi krátke obdobie (
interval) čas; 2. samostatná stránka javu.
Ekonomický slovník
Okamih importu- dátum prijatia colného vyhlásenia vo vzťahu k nákladu colným orgánom.
Ekonomický slovník
Okamih nadobudnutia platnosti— V zaistení: isté
výška finančných prostriedkov na
zmluva o zaistení
prebytok strát, pri dosiahnutí ktorých
požiadavky na uchovávanie ........
Ekonomický slovník
Okamih splnenia záväzku predávajúceho previesť tovar- zodpovednosť predávajúceho
odovzdať
tovar kupujúcemu sa považuje za splnený: 1) v
okamihom dodania tovaru kupujúcemu, ak je v zmluve uvedený záväzok......
Ekonomický slovník
Okamih odoslania- - účtovníctvo
dátum zaznamenania odoslania produktu kupujúcemu; pri zasielaní produktov nerezidentskému príjemcovi - je to dátum doručenia úradu
doprava alebo spoje.........
Ekonomický slovník
Moment prechodu- fixácia
exportovať a
dovoz tovaru o
okamih prekročenia hranice, prechod majetku z jednej ruky do druhej, teda okamih odovzdania majetku.
Ekonomický slovník
Okamih prechodu tovaru cez hranice— účtovníctvo
exportovať a
dovoz sa uskutočňuje podľa
v okamihu, keď prekročia štátnu hranicu. Okamžik PRECHODU TOVARU CEZ HRANICE na vývoz sa považuje: 1) za......
Ekonomický slovník
Dodacia lehota— - dátum dodania produktov dopravcovi alebo komunikačnému orgánu, vyznačený pečiatkou na prepravnom doklade alebo dokumente komunikačného orgánu, dátum potvrdenia o prevzatí alebo potvrdenia o prevzatí.......
Ekonomický slovník
Moment predaja— - príjem peňažných prostriedkov na bankové účty za tovar, prácu alebo služby a za hotovostné platby - deň prijatia výnosu na pokladňu.
Ekonomický slovník
Okamih predaja tovaru — -
moment, v ktorom
tovar odoslaný alebo uvoľnený kupujúcemu sa považuje za predaný. Z účtovného hľadiska
účtovným momentom realizácie je čas.......
Ekonomický slovník
— -
bod v čase, v ktorom
produkty odoslané kupujúcemu sa považujú za predané (
zásielka resp
platba za produkty).
Založenie M.r. Produkty........
Ekonomický slovník
V čase otvorenia— PRI OTVORENÍ Vzťahuje sa na pokyn maklérovi na nákup cenného papiera za cenu „US.o.“ na burze. Neexistuje žiadny cenový limit. Ak sa však objednávka týka kúpy alebo predaja.......
Ekonomický slovník
Platba v hotovosti pri doručení— NA DOBIERKU Nákup uskutočnený za podmienky, že
tovar bude zaplatený
doba dodania Je potrebné rozlišovať medzi napr
predajné podmienky a podmienky predaja v hotovosti,......
Ekonomický slovník
Užitočnosť naraz— ČASOVÁ VYUŽITEĽNOSŤ Užitočnosť produktu alebo služby v určitom okamihu
Ekonomický slovník
Preacuisition Profit (zisk v čase akvizície)— nerozdelený zisk spoločnosti predtým, ako ho získa iná spoločnosť. Zisky v čase nadobudnutia v zásade nepodliehajú rozdeleniu medzi akcionárov preberajúcej spoločnosti......
Ekonomický slovník
Moment— Výpožička z nemčiny, kde Moment je z latinského hybnosť, späť k slovesu moveo – „pohybujem sa“. Príbuzné slová: mobil, nábytok atď.
Krylovov etymologický slovník
Moment začiatku kolektívneho pracovného sporu- - deň oznámenia rozhodnutia zamestnávateľa o zamietnutí všetkých nárokov zamestnancov alebo ich časti alebo o neoznámení zo strany zamestnávateľa v súlade s článkom 4 tohto federálneho .........
Právny slovník
Moment prechodu— - zaznamenávanie dovozu a vývozu tovaru v momente prevodu majetku z jednej ruky do druhej pri prekročení hranice, teda v momente prevodu majetku.
Právny slovník
Okamih nástupníctva štátu- dátum nahradenia štátu nástupcom štátu predchodcu v zodpovednosti za medzinárodné vzťahy vo vzťahu k územiu, ktoré je predmetom......
Právny slovník
Okamih realizácie, Okamih predaja— - okamih, v ktorom sa produkty odoslané kupujúcemu považujú za predané (dodanie alebo platba za produkty). Založenie M.r. výrobky sa evidujú v účtovníctve .........
Právny slovník
Moment skutočného zadržania- moment skutočného odňatia slobody pohybu osoby podozrivej zo spáchania trestného činu, vykonaného spôsobom ustanoveným Trestným poriadkom Ruskej federácie (článok 15 článku 5 Trestného poriadku Ruskej federácie federácia).
Právny slovník
Krútiaci moment— , rotačné pôsobenie sily. Keď teda turbína otáča generátor, vytvára krútiaci moment pozdĺž osi otáčania. Výkon rotačného motora, napríklad ŠTVORTAŽNÉHO......
Magnetický moment— , meranie sily permanentného magnetu alebo cievky s prúdom. Je to maximálna sila otáčania (krútiaci moment) aplikovaná na magnet, cievku alebo elektrickú energiu......
Vedecko-technický encyklopedický slovník
Všetci sme zvyknutí spájať pojem „spoľahlivá podpora“ s tvrdým povrchom. Pre auto je to zem. Nemohlo to byť silnejšie. Každý môže vyskúšať a cítiť. Vzduch je nespoľahlivá látka, ale je takpovediac biotopom veľkej armády zariadení ťažších ako vzduch, lietadiel a vrtuľníkov.
Lietadlo L-410. Kompenzátory servopohonov výškovky a kormidla sú jasne viditeľné.
A práve to im poskytuje veľké možnosti, vďaka čomu je pobyt týchto kovových vtákov stovky a tisíce metrov nad zemou celkom pohodlný.
Špecifiká sú tu, samozrejme, iné a hoci niektoré výrazy používané pre stroje pohybujúce sa po tvrdom povrchu na 4 kolesách znejú pre lietadlo rovnako, tu sa podobnosť vo všeobecnosti končí.
Stabilita, ovládateľnosť, vyváženie, vyrovnanie. Bez toho všetkého a ešte oveľa viac sa vo vzduchu nezaobídete. Navyše, všetky tieto veci sú často prepojené.
Na odhalenie svojich schopností lietadlo využíva aerodynamické povrchy.
Všetok pohyb a orientácia vo vzduchu je založená na pôsobení rôznych síl a momentov, z ktorých väčšina má v tej či onej miere aerodynamický charakter. Tieto sily a nimi generované momenty vznikajú pri interakcii aerodynamických plôch s prúdením vzduchu.
Sily a momenty, rozdielne v miestach pôsobenia a vplyvu, možno rozdeliť na užitočné a škodlivé. Nikto o tom nepochybuje :-), rovnako ako fakt, že základom zlepšenia aerodynamiky lietadla je potreba zväčšovať všetko užitočné a obmedzovať to, čo škodí.
To všetko sa robí rôznymi spôsobmi av súvislosti s tým existuje niečo ako kompenzácia. To znamená, že je pravdepodobné, že nejaký nežiaduci účinok nemožno odstrániť, ale možno ho kompenzovať, čo je vo všeobecnosti ekvivalentné jeho odstráneniu.
Čo je také škodlivé, čo treba kompenzovať počas letu lietadla? Áno, vo všeobecnosti je všetkého dosť. Dnes sa ale zastavíme pri momente aerodynamických síl, ktorý má podľa mňa trochu exotický názov. Toto závesný moment. Zdá sa, že jeho názov nenaznačuje spojenie s aerodynamikou, no v skutočnosti je spojenie priame.
Je to jednoduché. akýkoľvek ovládacia plocha Lietadlo je spojené so zvyškom konštrukcie pomocou závesu. Pri vychyľovaní počas procesu riadenia dochádza k pôsobeniu aerodynamickej sily, ktorá vzhľadom k bodu otáčania tejto plochy (teda stredu závesu) presne vytvára moment, ktorý sa z pochopiteľných dôvodov nazýva tzv. pántový moment.
Od čoho závisí jeho veľkosť a aká presne je jeho škodlivosť? Aj keď by bolo asi správnejšie spomenúť nielen škodlivosť, ale aj užitočnosť momentu závesu. Preto opravme otázku: v čom je škoda a aký je jej prínos, ak existuje?
O veľkosti.
Veľkosť momentu, ako je známe, je určená veľkosťou sily a pákovým efektom tejto sily. Pre náš prípad závisí veľkosť aerodynamickej sily od plochy ovládacia plocha. A rameno je určené jeho tetivou (rovnako ako ), keďže čím je tetiva dlhšia, tým je bod pôsobenia sily (to znamená stred tlaku riadiacej plochy) ďalej od bodu otáčania (tj. , stred pántu).
Je zrejmé, že so zväčšovaním geometrických rozmerov lietadla, ktoré si vyžaduje zväčšenie požadovaných rozmerov kormidiel, závesný moment tiež zvyšuje. Zvyšuje sa aj so zvyšujúcim sa uhlom vychýlenia ovládacej plochy.

Schéma výskytu závesného momentu.
Okrem toho sa moment závesu zvyšuje so zvyšujúcou sa . Sú tu dva dôvody. najprv je zvýšenie rýchlostného tlaku, čo spôsobuje zvýšenie aerodynamickej sily. Po druhé dôvod, ktorý je typický skôr pre vysoké rýchlosti, je v tom, že pri prechode z podzvukových do nadzvukových rýchlostí sa aerodynamické plochy (vrátane riadiacich) posúvajú dozadu (spomínal som to).
Toto posunutie prirodzene spôsobuje zvýšenie sily pôsobiaceho ramena (vzhľadom na záves) a v konečnom dôsledku aj zvýšenie hodnoty momentu závesu. Táto hodnota môže byť významná, takže je načase pripomenúť si škodu.
O škode.
Závesný moment je určite prítomný, ale na veľkých lietadlách alebo pri vysokých rýchlostiach (alebo oboch spolu) môže dosiahnuť jednoducho nadmerné hodnoty.
Keďže generovaná sila sa prenáša na prvky riadiaceho systému, určite musia mať určitú pevnosť, aby odolali všetkým týmto zaťaženiam. A zvýšenie sily veľmi často znamená zvýšenie hmotnosti, čo nemožno nazvať pozitívnym faktorom pre žiadne lietadlo.
Okrem toho existuje jeden článok v kontrolnom systéme, ktorý vo všeobecnosti nemožno posilniť alebo posilniť. To je pilot, ktorý cez ovládacie prvky v kokpite vníma vplyv momentu závesu na riadiace plochy.
Keďže vytvorená sila sa prenáša cez prvky riadiaceho systému na riadiacu páku lietadla a pedále v kokpite, pri pilotovaní bude pilot nútený zažiť a prekonať záťaž, niekedy veľmi veľkú a za určitých letových podmienok (na vhodných vybavenie, samozrejme) možno jednoducho nezvládne ovládanie. Nedostatočná svalová sila...
Bohužiaľ, je bežné, že pilot, ako každý človek, sa unaví. Preto aj keď hodnoty závesný moment nie je tabuľka grandiózna, stále je takmer vždy potrebné ju zredukovať, teda čiastočnú alebo aj úplnú kompenzáciu, aby sa pilot zbavil zbytočného stresu pri pilotovaní.
Najčastejšie to znamená prítomnosť ďalších systémov v lietadle, to znamená rovnakú váhu navyše. Samozrejme, môže byť malý, vo forme niekoľkých malých tyčí alebo elektrických pohonov, ale môže byť aj vo forme ťažkých hydraulické posilňovacie systémy(viac o tom nižšie), kedy je lietadlo nútené niesť so sebou sadu masívnych boosterov a systém na ich údržbu. Škoda je očividná :-). No a čo výhody?
Škodlivé a prospešné záťaže.
Letový režim lietadla môže byť vo všeobecnom prípade buď manévrovateľný, keď zariadenie vykonáva akékoľvek krátkodobé zmeny letu, alebo stabilný.
Keď je lietadlo v nejakom ustálenom letovom režime dlhší čas, normálne alebo abnormálne (napríklad pri stúpaní alebo keď je ťah motora asymetrický), potom je pilot v závislosti od podmienok nútený vyvinúť určité úsilie na ovládanie. na udržanie tohto režimu (to je rovnováha lietadla), čím sa pôsobí proti kĺbovému momentu. Tieto snahy sú tzv vyrovnávanie. Unavujú len pilota, preto je vhodné sa ich zbaviť.
V manévrovacom režime sa uplatňujú takzvané manévrovacie sily. Povaha ich výskytu je stále rovnaká, ale význam je trochu iný. Samozrejme, pilot ich tiež omrzí, ale nemôžete sa ich úplne zbaviť. V súlade s týmto zaťažením, ktoré pilot cíti na riadiacej páke a pedáloch, vykonáva akrobaciu. Umožňujú mu posúdiť intenzitu manévru, preťaženie a správanie lietadla.
Toto je presne ono prospech(hoci nepriamy) závesný moment.
Na základe toho všetkého boli vyvinuté rôzne konštrukčné riešenia na boj závesný moment. Princíp ich použitia do značnej miery závisí od charakteru záťaže, ktorú pilot vníma prostredníctvom riadiacej páky a pedálov v kabíne, teda vo všeobecnosti od letového režimu.
Metódy kompenzácie kĺbových momentov.
V prvom rade si povieme o tzv aerodynamická kompenzácia.
Jeho podstata spočíva v priaznivom využití energie prichádzajúceho prúdu vzduchu. V dôsledku určitých rozhodnutí o dizajne manažérov aerodynamické povrchy(kormidlá) sú vytvorené podmienky pre vznik momentu síl aerodynamického charakteru, veľkosťou porovnateľného s momentom závesu, ale smerujúceho v opačnom smere.
Tento novovzniknutý moment čiastočne alebo úplne kompenzuje sklopný, čím odstraňuje zbytočné zaťaženie riadiacej páky a uľahčuje pilotovanie. Povaha jeho výskytu je podobná povahe výskytu „nášho škodlivého“ momentu a v podstate je úplne rovnaká závesný moment, vznikajúce len na takpovediac špeciálne určených miestach.
Axiálna kompenzácia.
Ide o jeden z najbežnejších typov jednoduchej aerodynamickej kompenzácie. Distribuované axiálna kompenzácia vďaka svojej jednoduchosti a účinnosti a tiež vďaka tomu, že neznižuje účinnosť samotného volantu. Jeho podstatou je, že os otáčania riadiacej plochy je posunutá dozadu, bližšie k nej (to znamená k bodu pôsobenia aerodynamickej sily). V tomto prípade sa kĺbový moment zníži znížením pákového efektu tejto sily.

Axiálna kompenzácia.
Takáto kompenzácia sa používa aj na viacrežimových lietadlách (vybavených hydraulickým posilňovacím systémom), ktoré lietajú podzvukovou aj nadzvukovou rýchlosťou. Je potrebné pre optimálne odľahčenie riadiaceho systému a zníženie potrebného výkonu hydraulických posilňovačov pri všetkých Machových číslach letu, ako aj zabezpečenie možnosti núdzového prechodu na ručné ovládanie v prípade poruchy hydraulického posilňovača. systém. Axiálna kompenzácia všestranné stabilizátory takéto lietadlá sa často vykonávajú pomocou „ nadmerná kompenzácia».
To znamená, že pri podzvukových rýchlostiach je miesto pôsobenia aerodynamickej sily (stred tlaku) pri vychýlení stabilizátora pred osou otáčania a prispieva k ďalšiemu vychýleniu stabilizátora do krajnej polohy (tj. vyloží to). Pri nadzvukových rýchlostiach sa miesto pôsobenia aerodynamickej sily posúva dozadu za os rotácie. Ale v dôsledku nadmernej kompenzácie na podzvukových úrovniach sa rameno sily na nadzvukovej úrovni ukáže ako malé, čo znamená, že sila zostáva malá. závesný moment.
Náhrada klaksónu.
Ďalším typom najjednoduchšej aerodynamickej kompenzácie je nadržaná kompenzácia. Obvykle sa implementuje na riadiace plochy plutiev a stabilizátorov nízko a stredne rýchlostných lietadiel.
V tomto prevedení je ovládacia plocha vybavená tzv nadržaný kompenzátor. Je to časť tejto plochy (výčnelok) umiestnená pred jej osou otáčania a profilovaná tak, že v neutrálnej polohe tvorí hrot plutvy alebo stabilizátora.
A keď sa plocha riadenia odchýli, presunie sa do prúdu (objaví sa klaksón) a vytvorí sa na ňom aerodynamická sila, ktorej moment vzhľadom na os otáčania plochy riadenia smeruje v smere opačnom k smeru pántový moment.

Princíp kompenzácie klaksónu.
Významnou nevýhodou kompenzácie klaksónu, ktorá výrazne obmedzila jej využitie v modernom letectve, je zhoršenie podmienok prúdenia okolo aerodynamických plôch pri lete vysokou rýchlosťou a pri veľkých uhloch vychýlenia kormidiel pri rôznych uhloch nábehu, čo spôsobuje citeľný nárast odporu a výskyt štrukturálnych vibrácií.
Na zníženie tohto efektu je možné použiť kompenzáciu zvukovodu v kombinácii s axiálnou kompenzáciou. Vzájomne sa dopĺňajú a umožňujú rozšíriť rozsah ich použitia pre rôzne letové režimy, najmä preto, že z konštrukčného hľadiska majú obe tieto možnosti určitú podobnosť...
Vnútorná kompenzácia.
Pri tejto metóde sa špička riadiacej plochy umiestni do komory vo vnútri nosnej plochy (krídla), ktorá je rozdelená na dve časti pružnou nepriepustnou priečkou (tzv. vyvažovací panel), pripojený k ponožke a konštrukcii krídla. Na križovatke riadiacej plochy s nosičom sú ponechané úzke medzery, ktoré spájajú vnútorné dutiny s atmosférou.
Pri vychýlení volantu sa na jednej z jeho plôch vytvorí tlaková plocha a na druhej podtlaková plocha. Obe tieto oblasti komunikujú s vnútornými dutinami cez naznačené štrbiny, v dôsledku čoho sa flexibilná priehradka ohýba v zodpovedajúcom smere a ťahá so sebou celú plochu riadenia.

Princíp vnútornej kompenzácie.
To znamená, že sa vytvorí moment nasmerovaný v smere opačnom k momentu ovládania závesu. Tento typ kompenzácie sa zvyčajne používa na krídelkách vysokorýchlostných lietadiel. Nie je tu žiadny vývod na ponožky ovládacia plocha do prúdu, čím sa nezvyšuje odpor. Pri implementácii takejto kompenzácie na tenkých profiloch sa však môžu vyskytnúť konštrukčné ťažkosti.
Kompenzácia serva.
Podzvukové jednorežimové lietadlá využívajú tzv servokompenzátory(z konceptu servo-, teda automatické pomocné zariadenie) alebo flettnery (pomenované podľa vynálezcu, nemeckého inžiniera Antona Flettnera). Takéto kompenzátory predstavujú malý ovládacia plocha, inštalovaný pozdĺž zadného okraja volantu.
Konštrukčne je všetko riešené tak, že táto plocha sa automaticky vychyľuje v opačnom smere ako je vychýlenie volantu. Aerodynamická sila vytvorená v tomto prípade na ramene až po os rotácie kompenzátora čiastočne alebo úplne vyrovnáva závesný moment volant
Pretože toto rameno je relatívne veľké, dokonca aj s malou plochou a malými uhlami jeho vychýlenia, veľkosť momentu, ktorý vytvára, je dostatočná na účinnú kompenzáciu kĺbového momentu povrchu riadenia. Ale v rovnakom čase servokompenzátor trochu znižuje účinnosť volantu, pretože „uberá“ časť jeho povrchu, aby vytvoril kompenzačný moment.
Aerodynamický servokompenzátory podľa princípu ich hospodárenia sa delia na dva druhy.
Prvý pohľad- ide o takzvanú kinematiku. V ňom sa ovládanie povrchu kompenzátora vykonáva pomocou tyče pripojenej k stacionárnej časti nosnej plochy. To znamená, že čím väčšie je vychýlenie volantu, tým väčšie je vychýlenie plochy kompenzátora. V tomto prípade pilot nemôže ovplyvňovať proces z kokpitu, ale v pozemných podmienkach môže byť riadiaca tyč vo všeobecnosti nastavená na rôzne uhly vychýlenia.

Schéma činnosti kinematického servokompenzátora.

Ďalší obvod pre kinematický servokompenzátor. 1 - ovládacia tyč, 2 - ovládacia plocha, 3 - kompenzátor.
Druhý typ- pokročilejší - je jar servokompenzátor. Vo svojom dizajne je hlavným článkom dvojramenná páka, ktorá sa voľne otáča na osi otáčania riadiacej plochy. Jedno rameno tejto páky je vložené medzi pružiny, ktoré majú určité napätie. Druhý je pripojený k hlavnej riadiacej tyči a riadiacej tyči povrchu kompenzátora.
Počas zaťaženia povrchu riadenia ( závesný moment) sú malé, to znamená, že neprekračujú hodnotu utiahnutia pružín, celá konštrukcia volantu sa otáča pôsobením hlavnej riadiacej tyče ako celku a volant sa vychyľuje bez vychýlenia kompenzátora.

Pružinový servokompenzátor.
Ale akonáhle kĺbový moment dosiahne určitú hraničnú hodnotu, ktorá je väčšia ako utiahnutie jednej z pružín, dvojramenná páka sa začne otáčať a tým vychyľovať povrch kompenzátora. To znamená, že sa zdá, že celý mechanizmus sa automaticky zapne, čím sa zníži námaha potrebná na vychýlenie volantu.
Ukazuje sa, že servokompenzátor Tento dizajn je možné použiť takmer v akomkoľvek režime letu, pretože funguje úmerne silám pôsobiacim v riadiacom systéme a nie uhlom vychýlenia. ovládacie plochy.
Anti-servo kompenzátor.
Zrejme treba spomenúť aj tzv anti-servo kompenzátor, aj keď funkcie tohto zariadenia sú v priamom protiklade k našej téme. Teda anti-servo kompenzátor neznižuje závesný moment, ale naopak ju zvyšuje. Samotný kompenzátor sa odchyľuje v opačnom smere ako bežný servokompenzátor. Analogicky s „nadmernou kompenzáciou“ môžeme povedať, že dochádza k „nedostatočnej kompenzácii“ :-).

Princíp činnosti antiservokompenzátora.

Dizajn antiservokompenzátora.

Antikompenzátor na stabilizátore lietadla Piper Ra-28-140 Cherokee. Zbiehavosť stabilizátora - antikompenzátor hore.
Toto zariadenie sa zvyčajne používa na ľahkých lietadlách, ktoré nie sú vybavené samostatným výťahom. Jeho funkcie plní celopohyblivý stabilizátor. Vďaka tejto konštrukcii je ľahké lietadlo dosť citlivé na ovládanie, takže antiservokompenzátor „zaťažuje“ riadenie, to znamená, že zlepšuje spätnú väzbu od stabilizátora k pilotovi, aby to „nepreháňal“ a nepreháňal. používajte nadmerné pohyby riadiacej páky.
Orezávanie.
Existuje ďalší spôsob aerodynamickej kompenzácie momentu závesu. Ale stojí trochu mimo ostatných. Faktom je, že všetky práve opísané kompenzátory pracujú s manévrovacími záťažami (hovoril som o nich vyššie) a tento sa používa na kompenzáciu vyrovnávania záťaže (aj o tom bola reč :-)).
Metóda sa nazýva orezávanie (z trim, čo doslova znamená „uviesť do poriadku“). a vo všeobecnosti s jeho pomocou možno znížiť vyrovnávacie zaťaženie ovládacích prvkov v kokpite na nulu. V tomto prípade sa lietadlo považuje za úplne streamované.

Schéma princípu činnosti trimra.
V tradičných orezávacích systémoch je pri tejto metóde aktívnym konštrukčným prvkom zastrihávač(v skutočnosti kompenzačná plocha) a samotný dizajn (ako aj jeho aerodynamický efekt) je v princípe podobný návrhu kinematického servokompenzátor.

Ďalší diagram, ako funguje zastrihávač. Tu 2 je zastrihávač, 1 je ovládací mechanizmus elektrického zastrihávača.

Karta trimovania výťahu.
Iba trim má vlastný riadiaci systém (zvyčajne mechanický alebo elektromechanický) a môže byť vychýlený pilotom z kokpitu, ktorý v tomto prípade podľa ľubovôle volí alebo mení výšku kompenzácie.
Neriadené sú aj tzv vyžínače. Môžu byť použité na nízkorýchlostných lietadlách a zvyčajne sa inštalujú na krídelká a kormidlá. Najčastejšie sú to ručne ohýbané pláty a používajú sa pri akejkoľvek aerodynamickej asymetrii lietadla.

Princíp činnosti nenastaviteľného trimra na krídelke lietadla.

Nenastaviteľný trimr na kormidlo lietadla L-29.

Neriadený trimmer na nosnej rakete cvičného lietadla.

Nenastaviteľný trimmer na nosnej rakete ľahkého motorového lietadla.
Rovnaký typ dosky je inštalovaný na čepele. Fungujú na rovnakom princípe a slúžia na elimináciu takzvaného mistaperu lopatiek pri rotácii, teda aby lopatky pri jeho rotácii nepresahovali povrch pomyselného kužeľa tvoreného listami rotora.

Nenastaviteľný zastrihávač na čepeli vrtuľníka.
Takéto vyžínače Ohýbajú sa aj ručne na základe údajov zo špeciálnych senzorov získaných počas pozemných testov.
Okrem tradičného dizajnu zastrihávača, zastrihávanie s pomocou riadený (alebo mobilný) stabilizátor, aj keď túto metódu už nemožno klasifikovať ako aerodynamickú kompenzáciu. Uhol inštalácie stabilizátora sa mení pomocou špeciálneho mechanizmu, ktorý ovláda pilot z kokpitu a nevyžaduje od neho žiadne úsilie.

Princíp preskupenia stabilizátora.

Vzájomný pohyb stabilizátora a výškovky.
Počas procesu premiestňovania stabilizátora sa plynule mení aj uhol výškovky, aby sa udržala rovnováha lietadla. Toto všetko pokračuje, kým sa aerodynamická sila, ktorá sa znovu objaví na stabilizátore, nerovná sile na výškovke, ktorá tam bola pred začiatkom posunu. V tomto prípade sa sila na ovládacej páke v kabíne blíži k nule.
Iné systémy.
Vo všeobecnosti použitie riadeného stabilizátora umožňuje zmenšiť veľkosť výťahu a tým aj potrebnú námahu na jeho pohyb. Táto metóda je pomerne účinná v širokom rozsahu zarovnaní a rýchlostí, zatiaľ čo stabilizátor má menší odpor ako pri tradičnom zastrihávač.
Samotný systém premiestňovania stabilizátora má však väčšiu váhu v porovnaní s bežným orezávaním. Okrem toho je potrebné prísne dodržiavať pravidlá a parametre pre inštaláciu stabilizátora pred vzletom v súlade so zameraním lietadla. Nedodržanie týchto pravidiel je plné vážnych leteckých nehôd.

Nastaviteľný stabilizátor pre lietadlá Embraer ERJ-190.
Okrem nastaviteľného stabilizátora existujú aj iné systémy, v ktorých sa vnímané zaťaženie znižuje zmenšením plochy ovládacie plochy, avšak bez zníženia účinnosti samotných riadiacich systémov ako celku.
V prvom rade ide o tzv servo volant. V tomto dizajne hlavné ovládacia plocha, to znamená, že samotný volant je voľne zavesený na svojom závese a nie je spojený s riadiacim systémom ovládaným pilotom. Na jeho konci je však aerodynamický povrch niekoľkonásobne menší (navonok podobný zastrihávač), ktorá sa volá servo volant a ktorý presne riadi pilot z kabíny.

Schéma servoriadenia.
Posilňovač volantu sa vychýli v opačnom smere, ako je požadované vychýlenie hlavného volantu. Sila, ktorá na ňom vzniká, spôsobí, že sa voľne zavesené hlavné kormidlo vychýli do požadovaného smeru. Toto vychýlenie nastane tak dlho, ako je moment od sily servo volant nebude v rovnováhe závesný moment(ten istý škodlivý, ktorý treba znížiť) na hlavnom volante.
Takáto rovnováha je možná vďaka veľkému rozdielu v ramenách síl pôsobiacich na volant a servo volant. V tomto prípade pilot na riadiacej páke pociťuje iba sily na servo koliesku, teda veľmi malé, pretože on sám servo volant má malú plochu.
Hlavnými nevýhodami riadiacich systémov so servo volantom je určité oneskorenie vychýlenia hlavného volantu a relatívne zhoršenie jeho činnosti pri nízkych rýchlostiach.

Kombinované použitie krídielok a spojlerov krídielok pre bočné ovládanie.
Ďalší príklad použitia rovnakého princípu. Táto aplikácia spojlery krídielok v bočnom riadiacom kanáli. Tieto ovládače samotné sú ovládané samostatným systémom a neovplyvňujú silu pôsobiacu na riadiacu páku lietadla. Ale ich paralelné použitie s krídelkami, okrem množstva ďalších pozitívnych aspektov (téma na iný článok :-)), umožňuje zmenšiť plochu krídielok, a teda aj veľkosť závesný moment na nich.
Používanie zosilňovačov v riadiacom systéme.
Ako vidíte, existuje dostatok spôsobov, ako kompenzovať moment závesu. Ako však už bolo spomenuté, jeho hodnota rastie s veľkosťou lietadla a jeho rýchlosťou letu. Skôr či neskôr môže prísť chvíľa, keď žiadna z existujúcich kompenzačných metód nebude účinná (najmä pri manévrovateľných nákladoch).
Aby sa tomu zabránilo a zvýšila sa schopnosť osoby riadiť lietadlo v rôznych režimoch, na mnohých moderných vysokorýchlostných (alebo veľkých) lietadlách sa v riadiacich kanáloch používa hydraulické posilňovanie, ktorého podstatou je, že pilot, pohybom riadiacej páky ovplyvňuje iba pohyb malej cievky (servoventilu), teda špeciálneho ovládacieho prvku v automatickom riadiacom systéme.
A táto cievka tvorí a pôsobí na veľký hydraulický valec (posilňovač), ktorý je spojený priamo s kormidlami lietadla.
Aby sme boli presnejší, podľa charakteru vplyvu na tento servoventil sa hydraulické posilňovacie systémy delia na dva druhy.

Schéma hydraulického zosilňovacieho systému reverzibilného typu.
najprv- ide o tzv reverzibilné systémy. Zvláštnosťou princípu ich činnosti (mimochodom, rovnako ako v systémoch posilňovača riadenia automobilov) je to, že na aktiváciu celého systému (začínajúc servoventilom cievky) je potrebné použiť malú počiatočnú silu. , ktorý sa pohybuje ovládacia plocha spolu so servoventilom. Následne sa do plnej prevádzky dostanú hydraulické posilňovače (boostery) a pilot naplno využíva riadenie.
Pozitívnou stránkou takéhoto systému je fakt, že pri jeho používaní pilot pociťuje rovnaké manévrovacie zaťaženie na rukoväti a pedáloch v podobe závesný moment. Nie v plnej výške, samozrejme, ale na správnu pilotáž to stačí. Jeho nevýhodou je, že pri vysokých rýchlostiach/veľkostiach lietadla sa môže zaťaženie natoľko zvýšiť, že pilot už nestihne urobiť prvotný posun na uvedenie systému do prevádzky.

Schéma hydraulického zosilňovacieho systému nevratného typu.
Pre takéto lietadlá a letové režimy existuje druhý typ hydraulické výstužné systémy - nezvratné systémy. Pri použití takýchto systémov úplne nedochádza k spätnému pôsobeniu letových zaťažení na riadiacu páku a pilot necíti ani malú časť záťaže, ktorú riadiaca plocha absorbuje. Všetky tieto záťaže sú úplne spojené s hydraulickým posilňovačom.
Ale ako už bolo spomenuté, pilot nemôže byť úplne zbavený pocitov, ktoré sú vlastné celému procesu riadenia. Koniec koncov, pomocou týchto pocitov „cíti“ rovinu a bez nich táto kontrola jednoducho nebude existovať.
Preto sa na lietadlách, ktoré používajú nevratné hydraulické posilňovače v riadiacich systémoch, používajú špeciálne zariadenia, zahrnuté do vedenia riadiaceho vedenia, ktoré simulujú letové sily na riadiacej páke a pedáloch. Ide o rôzne mechanizmy (pružiny) a hydraulické nakladacie mechanizmy, automatické stroje na riadenie záťaže.
Automatické riadiace zariadenia využívajú údaje o rýchlostnom tlaku získané zo snímačov celkového a statického tlaku vzduchu, čím vytvárajú reálny obraz zodpovedajúci manuálnemu riadeniu.
Spolupracujú s nakladacími mechanizmami a mechanizmy efektu trimrov, ktorý tiež simuluje činnosť trimrov, ako pri úplne manuálnom ovládaní.

Trimovací mechanizmus vrtuľníka.
Mechanizmy trimovacieho efektu sú v tomto prípade v zásade podobné ako trimovacie zariadenie na vrtuľníku. Ako to konštruktívne vykonať na vrtuľníku vyžínače ako pri lietadlách nie je možné, potom sa vyloženie riadiacej páky vrtuľníka v najjednoduchšom prípade vykonáva pomocou elektromechanické zariadenie na uvoľnenie pružiny.
==========================
To je asi všetko. Vo všeobecnosti ide o metódy a technické riešenia na obmedzenie alebo odstránenie účinku závesný moment v systéme riadenia lietadla. Všetky platia v tej či onej miere. Niektoré často, niektoré oveľa menej často, v závislosti od účelu a konštrukcie lietadla a vrtuľníka.
Všetky technológie, ako napríklad riadiace systémy, sa však pomerne rýchlo zlepšujú. Už teraz je tendencia transformovať pilota (hlavne na moderných lietadlách najnovšej generácie) z aktívneho pilota na pasívne ovládajúceho :-), za ktorého premýšľa počítač a pilotovanie je vykonávané prístrojmi a automatizačnými systémami. jemu podriadené, ktoré zahŕňajú proces orezávania sa vykonáva automaticky.
Možno... Je to možné... Ale zrejme nie teraz... Nie v blízkej budúcnosti :-)....
Na záver pár typických fotografií k téme, ktoré som do textu nezaradil :) ...
Dobudúcna.

Lietadlo Vought F4U Corsair.

Chvost Vought F4U Corsair. Viditeľné sú servokompenzátory kormidla a výškovky (externé) a trimmer výškovky (interné). Kormidlá majú axiálnu kompenzáciu (určitá konštrukčná podobnosť s kompenzáciou klaksónu).

Prevádzka LV a RV servokompenzátorov na lietadle Vought F4U Corsair.

Mechanické ovládacie koleso pre výškovku lietadla Cessna-172.

Kokpit Boeingu 737 Classic. Kolieska (volanty) na ovládanie prestavenia stabilizátora na stredovej konzole.

Kokpit Airbusu 320-214. Ovládače sklonu sú jasne viditeľné (kolesá s bielymi značkami).
Aerodynamické kĺbové momenty sú momenty aerodynamických síl pôsobiacich na ovládacie prvky vzhľadom na ich osi otáčania. Kĺbový moment sa považuje za pozitívny, ak má tendenciu vychyľovať kormidlá alebo krídelká kladným smerom.
Lietadlá používajú reverzibilné a nezvratné riadiace systémy. Pri lietadlách s reverzibilným systémom riadenia je celý kĺbový moment alebo jeho určitá časť vyvážený úsilím pilota vynaloženým na riadiacu páku. V lietadlách s nevratným riadiacim systémom je celý moment závesu vnímaný kormidlovým zariadením (posilňovačom), ktoré vychýli ovládacie prvky.
Závesný moment akéhokoľvek ovládacieho prvku je rovný
kde je koeficient kĺbového momentu;
V súlade s tým plocha a priemerná aerodynamická tetiva riadenia;
Koeficient prietokovej brzdy v oblasti chvosta.
V moderných lietadlách, ktoré majú veľké riadiace plochy a lietajú vysokou rýchlosťou (rýchlostné tlaky), sú kĺbové momenty veľké. Veľkosť otočného momentu je možné znížiť znížením jeho koeficientu pomocou aerodynamickej kompenzácie ovládacích prvkov. Existujú rôzne typy aerodynamickej kompenzácie: axiálna, vnútorná, kompenzácia serva, kompenzácia trimu (obr. 11).
 |
Ryža. 11. Hlavné typy aerodynamickej kompenzácie a prevádzkový diagram trimra:
a - axiálne; b - vnútorný; c - kompenzácia serva; g - pomocou trimera; 1 - os otáčania; 2 - kompenzátor; 3 - tyč riadenia; 4 - trimmer; 5 - ovládacia tyč trimra
Axiálna kompenzácia je najrozšírenejšia vďaka svojej jednoduchosti konštrukcie a dostatočnej účinnosti (obr. 11, a). Navyše to nemá prakticky žiadny vplyv na účinnosť kontrol.
Keď sa os otáčania posunie späť od nábežnej hrany, časť volantu umiestnená pred osou otáčania (kompenzátor) vytvorí závesný moment opačného znamienka. To vedie k zníženiu celkového momentu. Ak je os otáčania zarovnaná so stredom tlaku volantu, potom sa moment závesu rovná nule - dôjde k plnej kompenzácii. Pri ďalšom posunutí osi otáčania späť dôjde k nadmernej kompenzácii a zmení sa znamienko závesného momentu.
Počas dlhého letu v akomkoľvek režime je žiaduce znížiť moment závesu na nulu. Na tento účel sa používajú trimre. Zastrihávač je pomocná plocha namontovaná na zadnej strane ovládača a má nezávislé ovládanie. Na dosiahnutie nulového momentu otáčania sa trimr vychýli pod príslušným uhlom v smere opačnom k vychýleniu ovládača. (Obr. 11, d)